竞赛时间为 7 月 29 日 8:00 至 8 月 1 日 20:00。参赛队员必须在早上 7:30 之
前到达竞赛现场,并携带学生证和参赛证备查。
本次比赛,我们选择了E题,题目如下:


机械结构
机械结构是本题的最大难点
怎么动?
拿到题目后整体上分为两种技术路线:
1.使用机械臂抓取
2.使用CoreXY结构进行抓取
由于我们并没有现成的高精度机械臂,故我们最终使用方案2。我们购买了两台写字机,使用3D打印件改装Z轴动作机构,并将XY电机全部更换为闭环步进电机以消除回程误差。
怎么抓?
第二个难点就是如何抓取,这里也有三种思路:
1.使用普通棋子+气泵+吸盘
2.使用普通棋子+机械爪
3.使用金属棋子+电磁铁
我们没有现成的机械爪,又担心气泵+吸盘如果吸力调节不好可能会吸起其他物品,所以首先实验了使用金属棋子,效果很好。实测可以稳定抓取直径20mm,厚度3mm的金属圆片。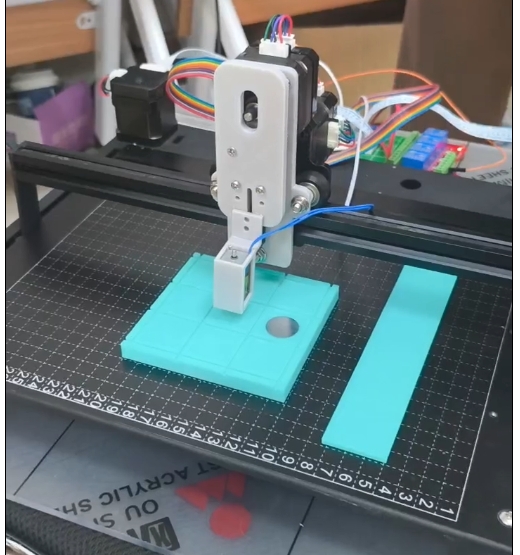
怎么转?
最后一个问题是题目第三问要求能在棋盘旋转后继续放置棋子,我使用机器视觉方法简单进行了检测,但精度并不理想,于是我们决定在棋盘下安装一个高精度电位器,开机自动归零,通过检测电阻变化计算棋盘旋转角度,效果非常好,定位极其准确,获得了评委的一致好评。

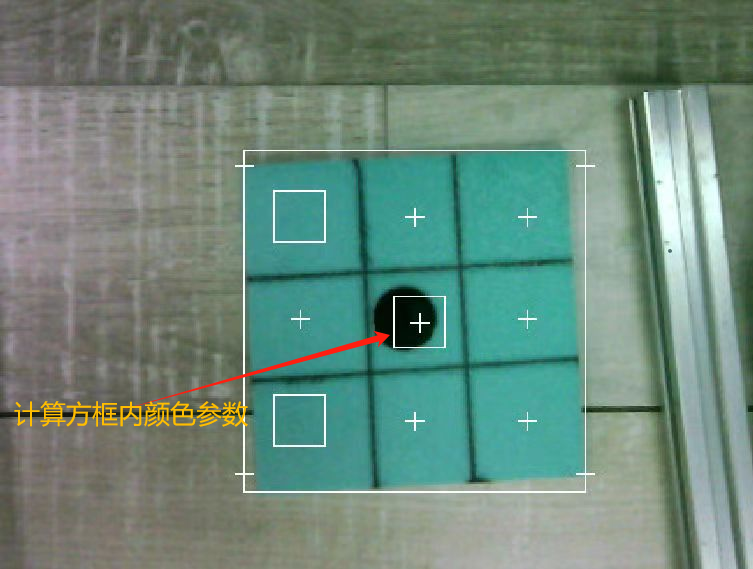
视觉部分思路
本题中的机器视觉任务难度不大,只需要能检测出棋子位置即可。我的思路是首先3D打印出一块与背景显著不同颜色的棋盘,通过Find_blobs找出色块坐标点,然后计算出九个格子的位置,最后对格子中心取样即可
人机对弈部分
这部分我们选择在openmv上运行,效果一般般,公开代码也丰富,故不赘述。
总结
赛后队伍变更,这是我第一次也是最后一次做电赛视觉,总体任务完成的一般,现场只完整跑出了123问,第45问受棋子反光影响,最后一步棋都下错了,第6问未能成功运行。最终得到浙江省二等奖。

谨以此文,纪念大一的电赛经历。